The Robot

The fine example of robotics you see featured in Robot Comps is a Surveyor SRV-1 Blackfin. With its trusty camera, built in wireless capability and four independent motors, the Robot Tour Guide is able to perceive and dominate its environment at breakneck speeds of up to 0.5 mph.
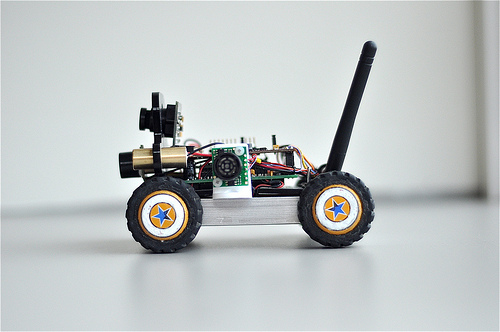
The robot's software capabilities include a Linux-based operating system, a web-based file upload interface to load Pico-C code onto the robot, and a Pico-C interpreter. The Pico-C language, as implemented onboard the SRV-1 includes built-in motor control and simple image processing functions such as blob detection.
This intrepid tour guide communicates with the server via its onboard wireless connection in order to receive tour instructions. The server figures out where the robot is, where the user wants to go, and how to get there. The server sends individual instructions to the robot in order to get from start to finish. All the robot has to do along the way is make sure it stays within the bounds defined by the orange tape.

In order to ensure that it stays within bounds, the robot uses built-in blob detection to rapidly binarize an image such that only the tape shows, like so:
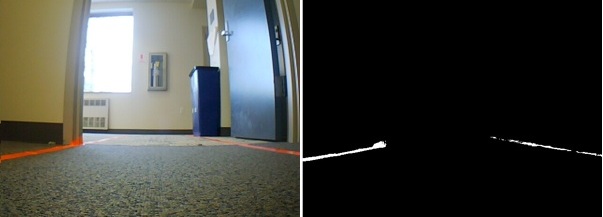
The robot determines based on where the tape pixels are, if it is getting too close to the tape. If the tape is indeed too close, it makes a slight (approximately 30 degree) turn away from the tape and continues moving forward, essentially bouncing off the tape.