Robotics: Manipulation Assignment
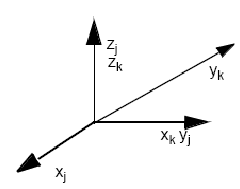
If the origins of two coordinate frames are on top of each other
(for example, after a rotation), you should draw the two frames right
on top of each other. This may result in some axes having two labels,
as in the image here. Be sure to draw it first on scrap paper first so
that your final drawing is neat.
Problem A
For each part, draw and label the axes. When you are done with this
question, you should have 5 different coordinate frames drawn and
labeled.
- Draw a 3-D coordinate frame where x points up and y
points to the right. We�ll call this a-coordinates. Label the axes
xa, ya, and za.
- Transform the a frame into the b frame by doing a
Trans(3, 4, 0) (relative to a�s coordinates) (label the axes!)
- Rotate the frame by 90 degrees about b�s y axis and
draw the resulting coordinate frame (call it c and label the
axes.)
- Translate the frame by (3,4,0) (relative to c�s
coordinates) and draw the resulting coordinate frame (call it d and
label the axes).
- Rotate the frame by -180 degrees about d�s x axis
and draw the resulting coordinate frame (call it e and label the
axes).
- Using just Trans and Rot operators (i.e. do NOT
compute the matrices) describe the transformation that will take a point in e coordinates and transform it to a point in a coordinates (in
other words, I�m looking for a bunch of Trans and Rots multiplied
together)
- To compute this transformation, did we use
“moving” or “fixed” coordinates?
Problem B
For each part, draw and label the axes. When you are done this question, you
should have 4 different coordinate frames drawn and labelled.
- Draw a brand new 3-D coordinate frame where x points
down, and y points to the left. Label the axes xh,
yh, and zh.
- Transform the h frame into the i frame by doing a
Trans (0,3,0) (relative to h�s coordinates)
- Rotate the i frame by -90 degrees about h�s z axis
and draw the resulting coordinate frame (call it j). IMPORTANT NOTE:
This is a “fixed axes” interpretation of the world, and we haven't
done an example quite like this in class (a rotation about the
original coordinate system after we have translated the
coordinate system away). This is a fairly difficult rotation to get
right. To do it correctly, pretend that the h and i frames are locked
together in space before you start the rotation so that your new j
frame ends up in the right place.
- Transform the j frame into the k frame by doing a
trans (2,0,0) (relative to the original h coordinate frame. Remember,
the orientation and position of the h coordinate frame should still
have not changed regardless of the previous steps.)
- Using just Trans and Rot operators (i.e. do NOT
compute the matrices) describe the transformation that will take a
point in k coordinates and transform it to a point in h
coordinates.
- Compute the matrix that corresponds to your answer
in the previous part.
- Now consider your two coordinate frames h and
k. Using “moving” coordinates, and just Trans and Rot
operators, describe the transformation that will take a point in k
coordinates and transform it into a point in h coordinates. NOTE: You
are going to have to think about what transformations you need to get
between the two axes when you�re using moving coordinates instead of
the fixed ones we used in steps h through k.
- Compute the matrix that corresponds to your answer
in the previous part. If it�s not the same as your answer for
“fixed axes,” something is wrong!
Problem C
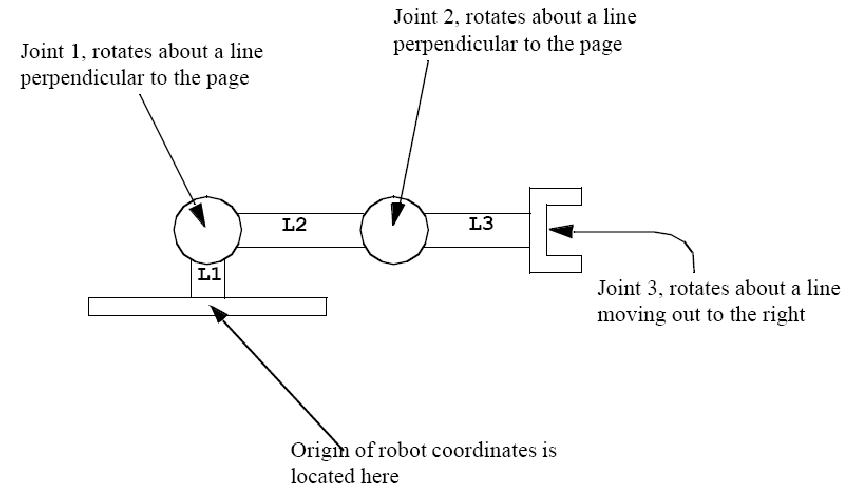
Assume that you have a robot whose initial position is as depicted
above, with 3 joints and 3 links as detailed above.
Wherever appropriate, feel free to use either Octave or
Mathematica. You may turn in a printout from either tool, but make
sure that whatever you turn in is clean and readable.
- Redraw the robot with axes labelled (when I did this
assignment I had four different coordinate frames). Assume that the
robot coordinate frame has x pointing up and y pointing to the right.
Also assume that gripper coordinates (with origin at the center of
joint 3) has z pointing straight out of the gripper (to the right in
the picture) and x pointing out of the paper in the picture.
- Suppose the length of Link 1 is 10 cm, Link 2 is 20
cm, and Link 3 is 15 cm. Compute the transformation matrix that takes
a point in gripper coordinates to a point in world coordinates when
the arm is pointing straight up, with Joint 3 rotated by 90
degrees. Use this matrix to convert the point (0, 0, 0) in gripper
coordinates into world coordinates. (Hint: visually check your answer,
if it looks right, there�s a good chance your matrix is right.)
- Suppose the length of Link 1 is 12 cm, Link 2 is 34
cm, and Link 3 is 8 cm. Compute the transformation matrix that takes a
point in gripper coordinates to a point in world coordinates when
joint 1 is rotated in such a way that the arm is pointing straight out
to the left. Joints 2 and 3 should be unrotated. Use this matrix to
convert the point (0, 0, 0) in gripper coordinates into world
coordinates.
Originally by Jennifer Kay, and modified by Dave Musicant.