Where the Rubber Meets the Code
Autonomous vehicle development in a a simulated environment, Carleton College CS department, 2017.
Autonomous vehicle development in a a simulated environment, Carleton College CS department, 2017.
This project includes C++ plugin files, and XML model and world files to control the operation of an autonomous vehicle in a simulated environment.
High Level Controller - Controls the high level decision making of the vehicle. Decides what ‘high level’ operation to perform ( avoid an obstacle, follow the road, return to lane etc.)
Low Level Controller - Controls the mechanical operation of the vehicle. Once the HLC ‘decides where to go’, the LLC ensures that the car will go there.
Lidar - Processes lidar sensor information from the cars lidar sensor to detect obstacles.
Camera - Processes camera sensor information to detect road lanes, and generate waypoints along the road to follow.
GPS - Gets cars position in the world.
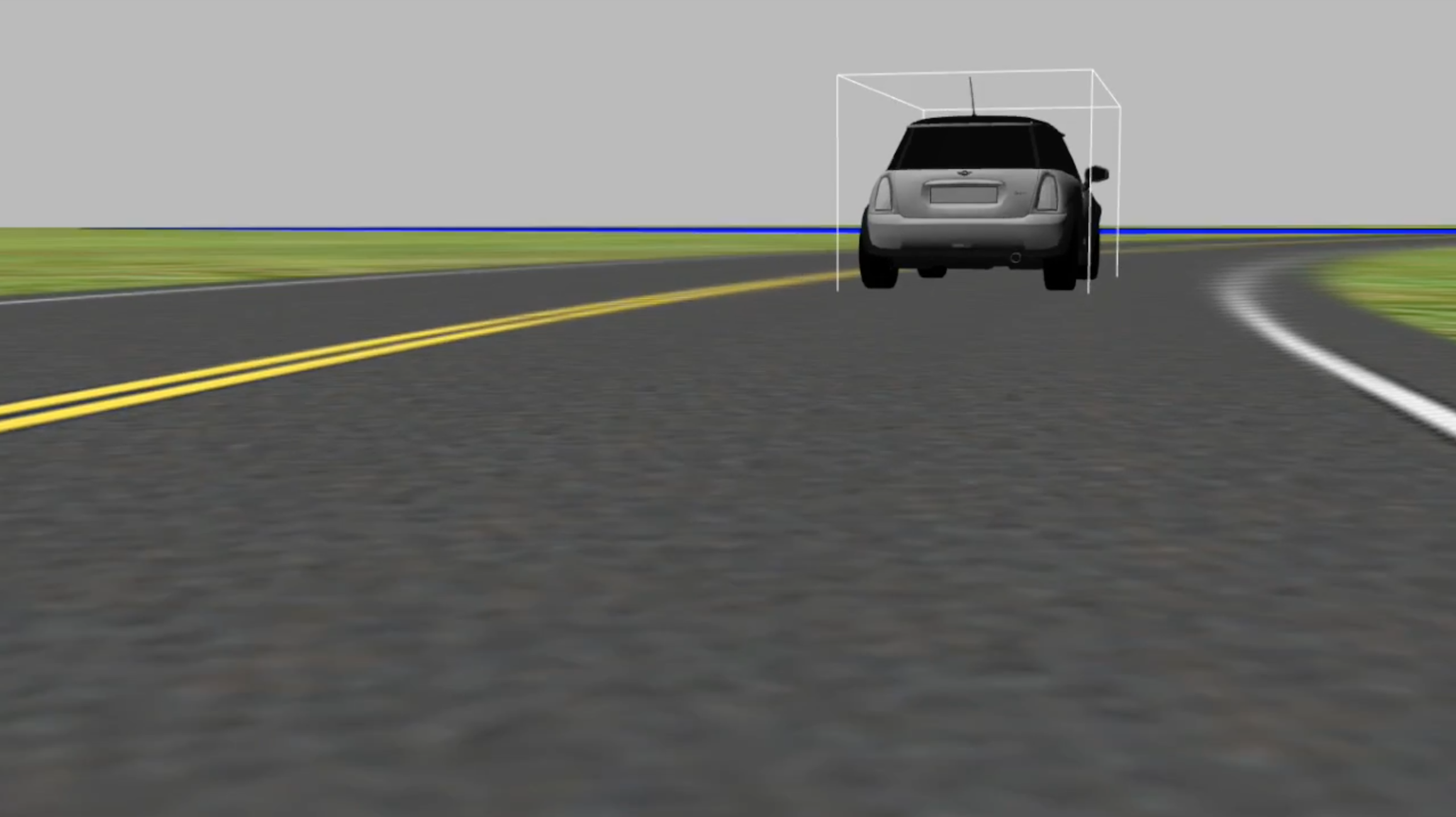
Gazebo - Physics simulator supporting our model, world, and plugin files
FADBAD++ - Gazebo dependancy for automatic differentiation
OpenCV - Camera Vision mathematics library used in image processing
These are demo videos of the car driving around the curves and avoiding obstacles appropriately, as well as a video that integrates both with nicer cinemetography. If these videos aren't loading properly, you can check them out at this folder on Google Drive.
From race cars to fire trucks, we love them all! We would all love to live in a world where human drivers are a remenant of the past. Autonomous vehicles may be very convenient, but even more importantly, this technology has the potential to save thousands of lives every year. We are all very proud to present our work in the field of autonomous vehicles!

Hello, my name is Mindi Coopster. I originate from the land of Great Britain. I am very inteligient. I can safely follow lanes and avoid dangerous traffic.

Kirsten is a 22 year old from Boulder, Colorado. She loves outer space, but she's apprehensive about going there. If Carleton offered an art minor, Kirsten would probably have one. Kirsten's two favorite car companies start with "l ": Lamborghini and Lotus.
Tom is from Suwon, South Korea! He enjoys skiing and a big fan of computer games like LOL and StarCraft. He had no idea what he was gonna do at Carleton, but somehow ended up participating in developing self-driving car that Ruyi has wanted. His favorite car is Lamborghini Aventador.
Will Richards is a 21 year old from Salt Lake City, Utah! He uses he/him pronouns. He enjoys skiing, the great outdoors, and video games. Will has a particular interest in computational biology and medicine. Will’s favorite car is the Honda civic.
Ruyi wishes she could drive, but she just can’t, so she has been waiting for self-driving cars for her entire life. Now time has come and she can finally get around this country without bothering other people! BTW surprisingly or not, she has also been a top fan of F-1 car racing.
Ben hails from Takoma Park, MD, a suburb of DC that never found out that the hippy era ended decades ago. He runs cross country and track at Carleton and escapes to the ceramics studio whenever the car doesn't feel like playing nice
Carleton CS faculty, staff, and students
Mike Tie for all the technical assistance
Our friends and family for all the love and support
Our amazing advisor Anna Rafferty for her guidance and advice throughout the project